

2026-Group 11
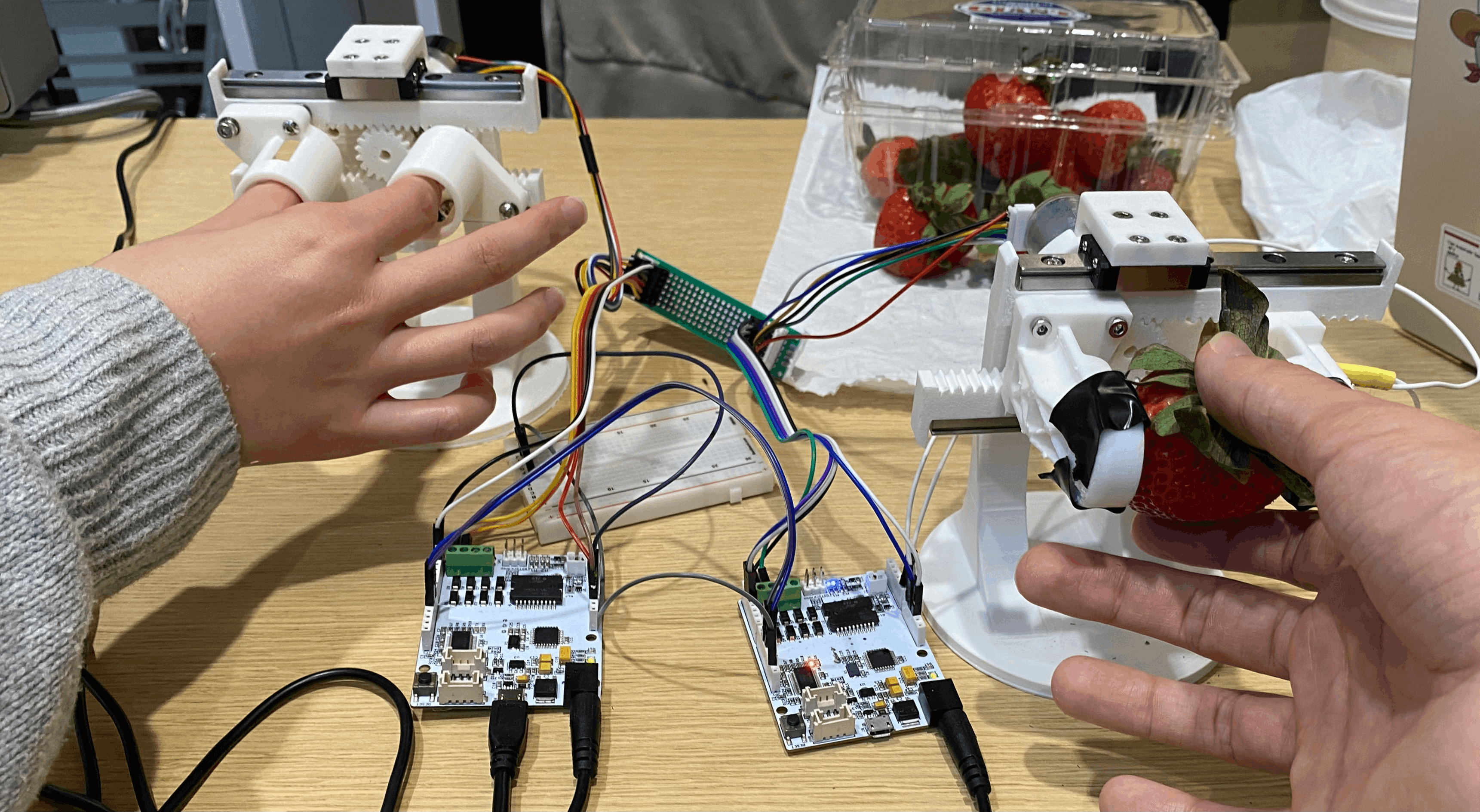
Figure 1: Demonstration of leader-follower teleoperation system at the Haptics Open House.
Low-Cost Open-Source 1-DOF Haptic Teleoperation Gripper
Project team members: Max Schaldach, Quynh Nguyen, Ke Wang, Loďc Poisson
This project presents a low-cost 1-DOF teleoperated gripper with haptic force feedback for fragile-object manipulation tasks that require the operator to perceive contact and regulate grasp force. A user manipulates a leader gripper while a follower gripper tracks the commanded motion remotely. Rather than relying on continuous force reflection, the system uses binary contact detection because the force-sensitive resistor exhibited contact-geometry-dependent responses and occasional signal discontinuities that limited reliable force estimation. When contact is detected at the follower, resistance is rendered to the user through a virtual spring-damper wall on the leader side. The system was evaluated through free-space teleoperation and delicate-object manipulation experiments under both force-feedback and position-only operation. Experimental results demonstrated stable free-space tracking, contact-response delays below 0.1 s, and virtual-wall rendering latency of approximately 0.2 s. During grasping tasks, contact detection reliably triggered haptic resistance, providing a consistent indication of object interaction without requiring continuous force estimation.
On this page... (hide)
Introduction
Teleoperated robotic systems are increasingly used in applications that require precise manipulation, including minimally invasive surgery and automated warehouse operations. In many of these tasks, operators must infer contact and regulate grasp force while manipulating fragile or compliant objects. Force feedback therefore plays an important role in teleoperation because it provides information about contact onset and object interaction that cannot be obtained reliably from commanded motion alone.
Beyond direct teleoperation, contact-aware manipulation is also becoming increasingly relevant for the development of autonomous robotic systems. Teleoperated demonstrations are commonly used to generate training and validation data for manipulation policies, but position trajectories alone provide only limited information about physical interaction with the environment. Incorporating force and contact information into these systems can improve grasp regulation, contact-aware control, and the automatic refinement of autonomous manipulation strategies.
This project presents a low-cost open-source platform for force-feedback-enabled teleoperation. The goal was to build a compact gripper system that demonstrates bilateral haptic interaction using hardware that is inexpensive, accessible, and reliable to reproduce. A 1-DOF architecture is well suited to that objective because it isolates motion tracking, contact detection, and haptic resistance without the additional mechanical and control complexity of a full robotic hand or arm.
The implemented system uses binary contact detection together with a virtual wall rendered on the leader side. This approach was motivated by preliminary characterization of the follower-side force-sensitive resistor, which exhibited contact-geometry-dependent responses and occasional signal discontinuities during grasping. While the sensor reliably distinguished contact from no-contact conditions, its output was not stable enough for transparent continuous force reflection. Instead of directly reflecting the measured sensor value, the controller detects contact events and renders resistance through a virtual spring-damper model. The resulting platform provides a robust and accessible baseline for low-complexity force-feedback grasping tasks and demonstrates how stable haptic contact rendering can be achieved using inexpensive hardware and simplified sensing.
Background
Bilateral teleoperation allows a human operator to control a remote robot while receiving feedback from the environment. A central challenge in such systems is the tradeoff between transparency (how faithfully the remote interaction is reflected to the operator) and stability, especially when communication delays are present. Lawrence [1] analyzed this tradeoff for several teleoperation architectures, while Niemeyer and Slotine [2] showed how wave-variable methods can preserve stability under delay.
Experimental work has also shown that haptic feedback can improve task performance, although the benefit depends on the task and the type of feedback. Wildenbeest et al. [3] found that low-frequency force feedback improved performance in a teleoperated assembly task, while additional high-frequency feedback produced smaller gains. Khurshid et al. [4] reported that grip-force feedback, contact feedback, and acceleration feedback can each influence teleoperated pick-and-place performance, but their effects depend on the manipulated object and task phase.
Tactile sensing has likewise been used to improve grasp regulation. Romano et al. [5] presented a grasp controller that uses pressure and acceleration sensing to trigger grasp-state transitions such as contact detection, load, lift, and release. Their results show that tactile signals can support stable grasping of previously unseen objects without relying on detailed object models.
More recent reviews emphasize that practical haptic teleoperation systems must balance fidelity, stability, delay, and sensing limitations. Patel et al. [6] summarize these issues in surgical robotics and describe both direct force-reflection and indirect force-display approaches. Park and Khatib [7] proposed a virtual-spring teleoperation scheme with local force control, illustrating another way to provide useful contact feedback when direct force reflection is difficult to realize.
The studies reviewed above demonstrate both the benefits of haptic feedback and the practical challenges associated with achieving reliable force reflection. In particular, low-cost teleoperation systems often face limitations in force sensing and control complexity. These considerations motivated the design choices in the present work. Rather than attempting continuous force reflection, the system employs binary contact detection and virtual-wall rendering to provide a simple and robust indication of object interaction using inexpensive hardware.
Methods
System Overview
The system consists of a leader haptic gripper manipulated by the user and a follower gripper that reproduces the commanded motion remotely. During operation, the leader transmits position commands to the follower, while the follower returns contact-state information used to generate haptic feedback. Contact at the follower is detected using a force-sensitive resistor and rendered to the user as a virtual wall on the leader side.
Both devices are controlled by a Hapkit motor-driver board interfaced with an Arduino Uno and communicate through a software serial link. Encoder measurements provide position feedback for motion control, while the contact signal is transmitted from the follower to the leader for haptic rendering. Figure 2 shows the complete teleoperation platform.

Figure 2: Leader-follower teleoperation system used for force-feedback grasping experiments.
Mechanical Systems Design
The leader and follower share a common mechanical architecture consisting of dual MGN9 linear guide rails and a 3D-printed rack-and-pinion transmission. The guide rails constrain motion to a single translational degree of freedom, while the rack-and-pinion transmission converts motor rotation into linear jaw motion according to

where r_p = 9 mm is the pinion radius and θ_p is the pinion angle.
Both devices are actuated by DC gear motors with integrated quadrature encoders. A higher-speed motor is used on the leader side to improve backdrivability, whereas a higher-torque motor is used on the follower side to provide sufficient grasping force during object interaction. Encoder feedback is used for closed-loop position control on both devices.
The two interfaces differ primarily in their end-effector design. The leader uses cylindrical finger inserts inspired by the da Vinci surgical system, while the follower uses jaw-shaped gripper surfaces. One follower jaw incorporates a thin-film force-sensitive resistor used for contact detection and haptic feedback generation.
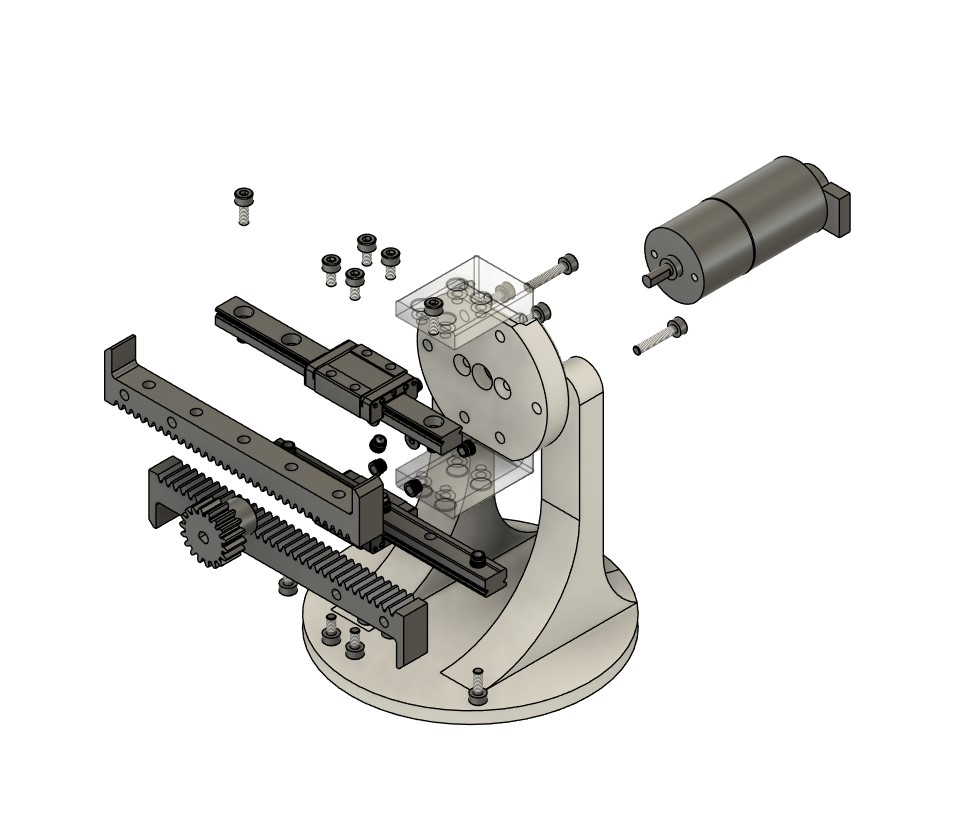
Figure 3: Exploded view of the common mechanical architecture used by both leader and follower devices, showing the rack-and-pinion transmission and linear guide assembly.
All custom components, including the racks, end effectors, and motor mounts, were fabricated from PLA using FDM 3D printing. Commercial guide rails, motors, bearings, and fasteners were combined with the printed parts to produce the final assembly. The total hardware cost of the system was approximately \$89.64.
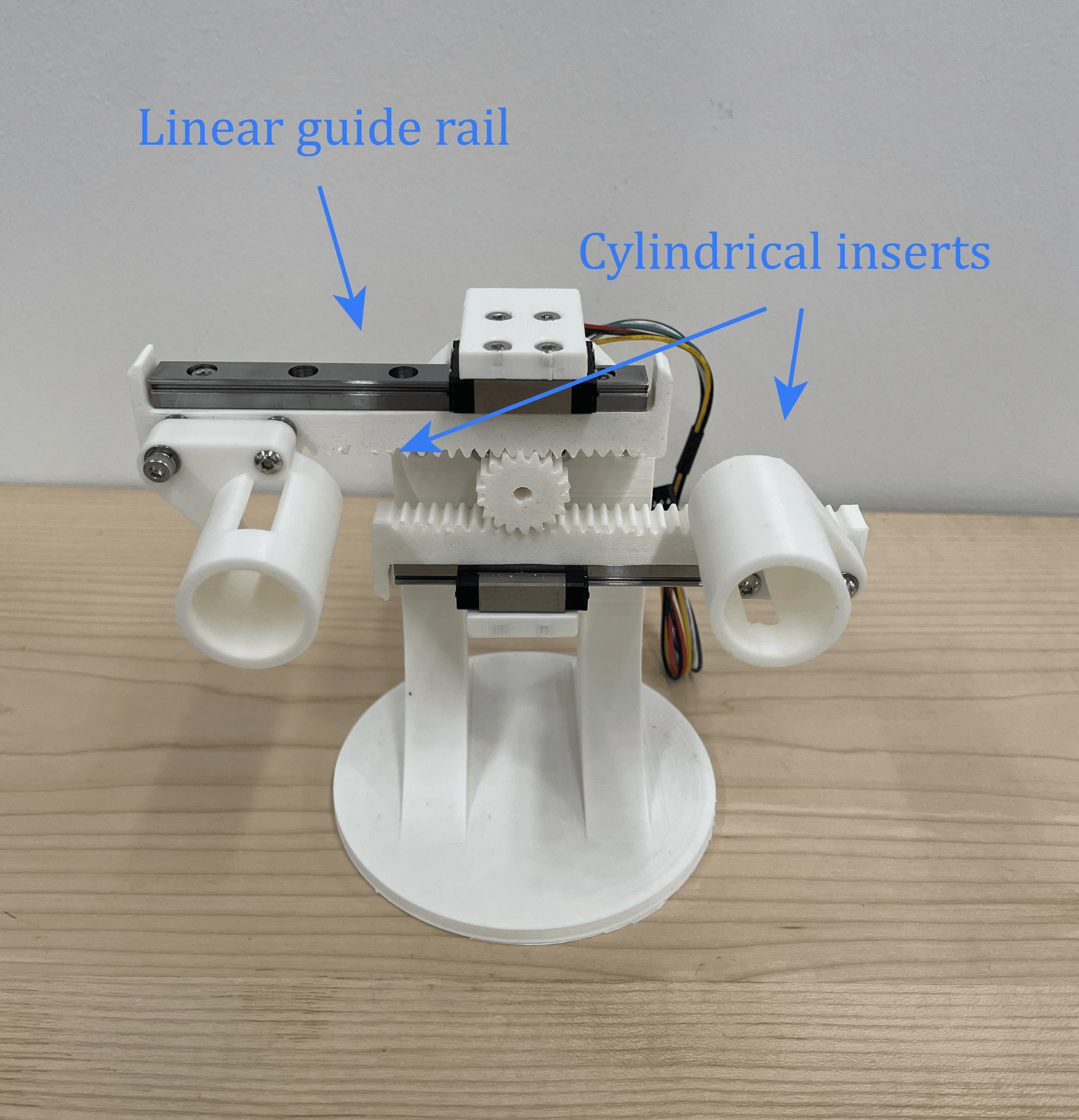
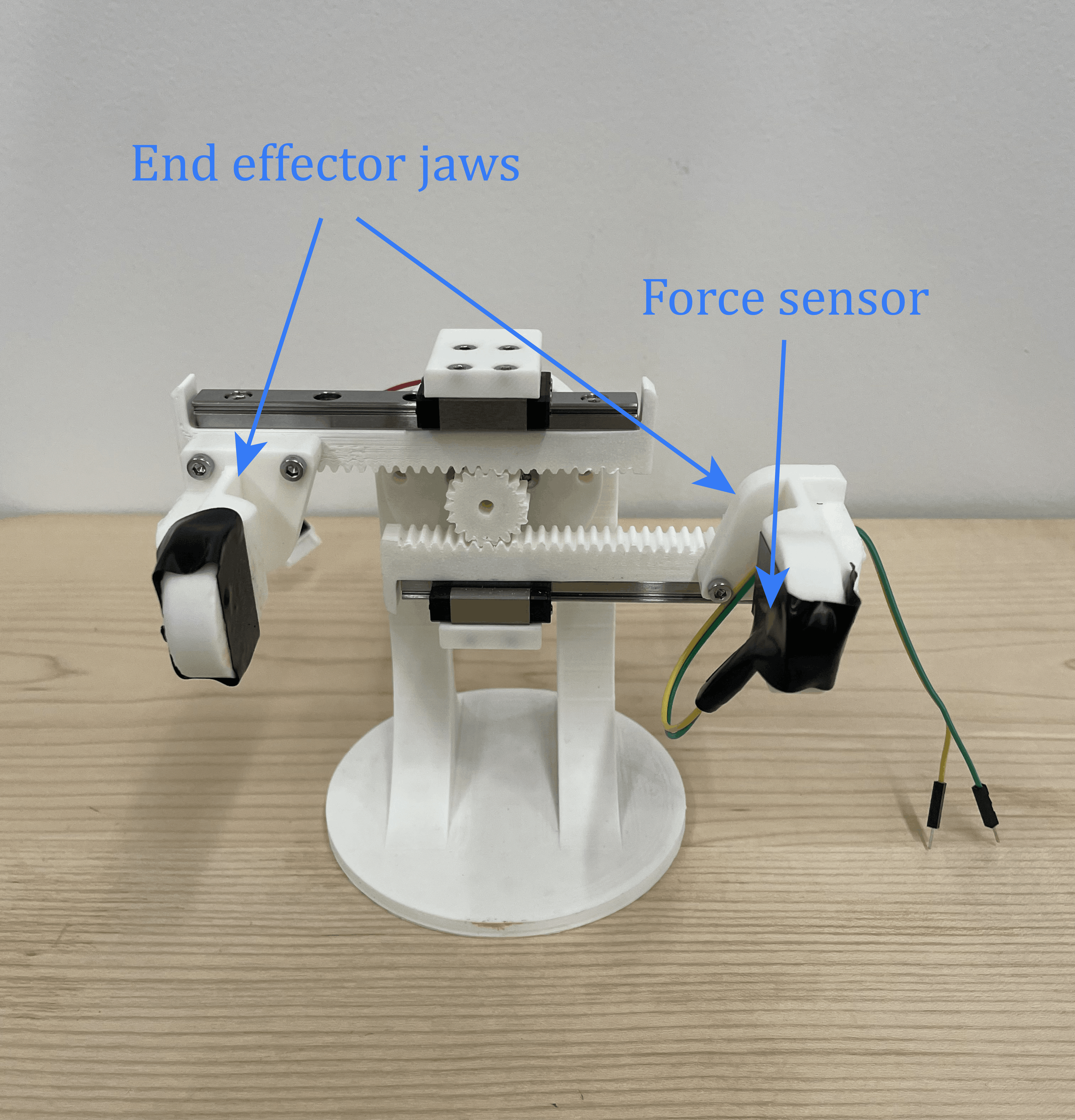
Figure 4: Close-up views of the end effectors. Left: leader-side haptic interface. Right: follower-side gripper with embedded force sensor.
System Control
The leader and follower communicate through independent embedded controllers and exchange position and contact-state information through a software serial link.

Figure 5: Wiring diagram for the haptic leader-follower teleoperation system.
The leader transmits commanded position to the follower, which tracks the command using encoder feedback and proportional-derivative control. Contact state is detected on the follower side and transmitted back to the leader, where it initializes a virtual wall for haptic rendering.
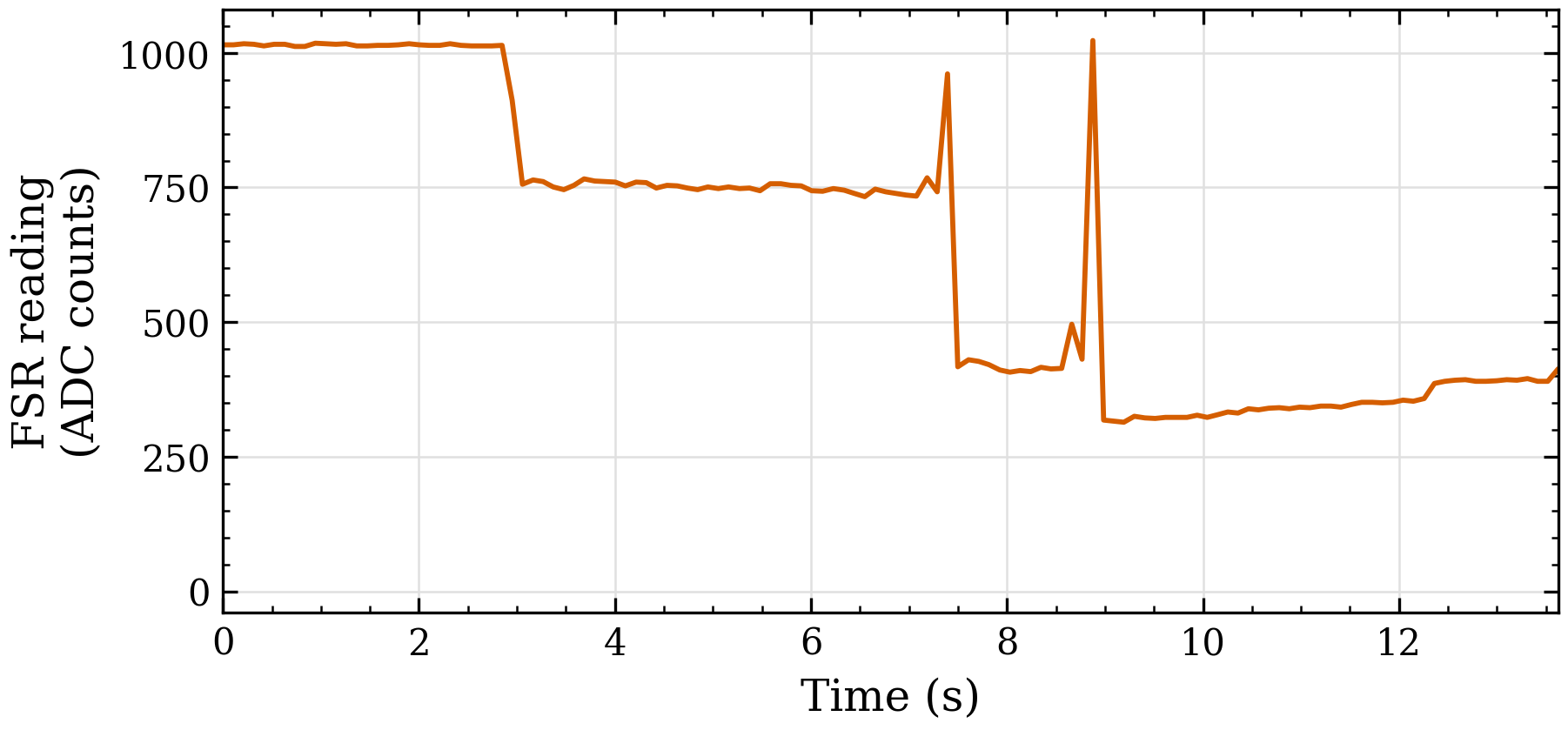
Figure 6: Representative force-sensor measurements during grasping trials.
Continuous force reflection was not used because preliminary testing showed that the FSR response depended strongly on contact geometry and exhibited abrupt signal discontinuities during grasping. Representative measurements are shown in Figure 6. As grip force increased, the FSR output did not change smoothly and occasionally exhibited large jumps in signal level. These variations were likely caused by changes in contact geometry and pressure distribution on the sensor. While contact onset remained clearly detectable, the discontinuities made reliable force calibration and continuous force estimation difficult.
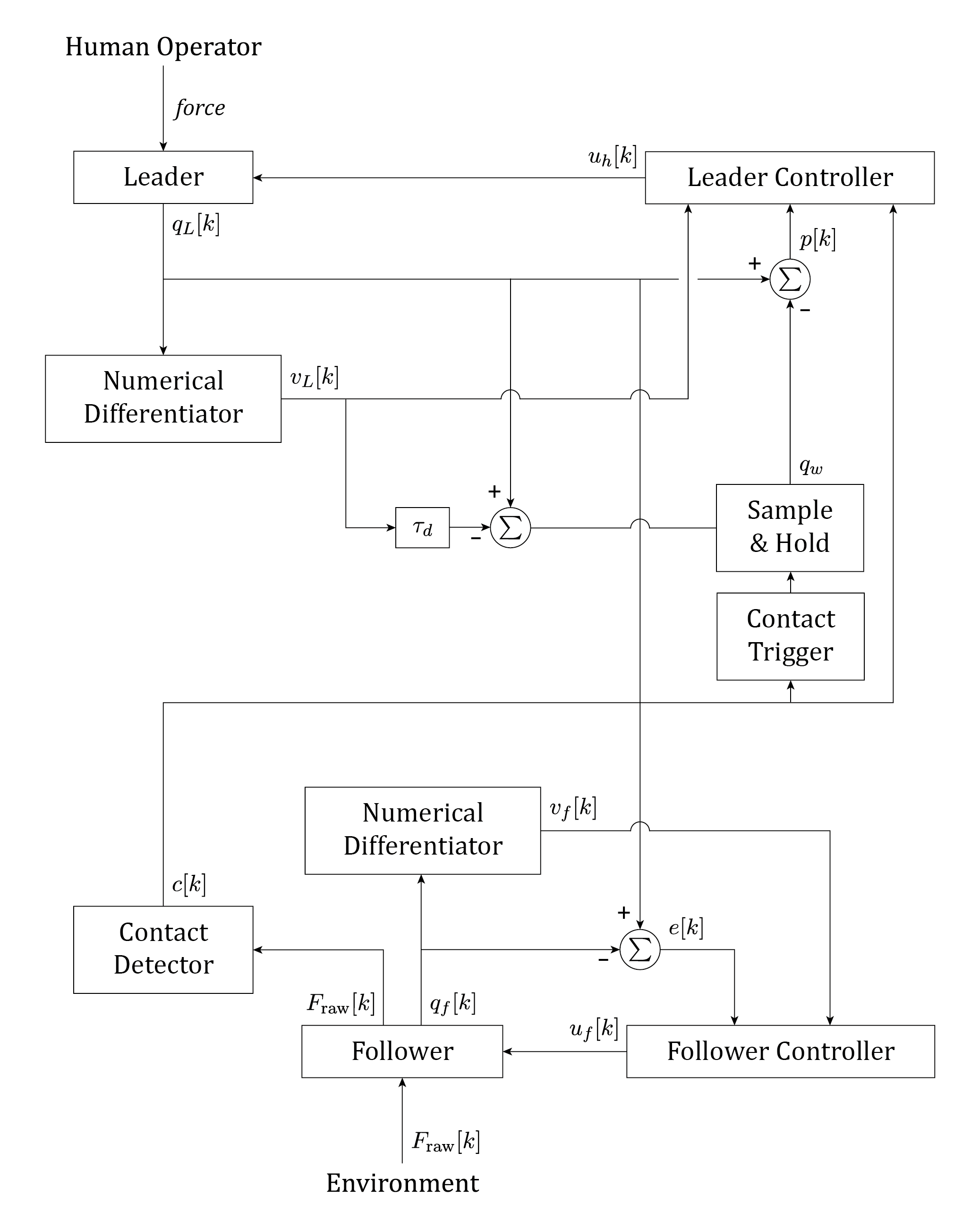
Figure 7: Control architecture for binary contact-triggered haptic rendering.
Follower-Side Position Control
The follower tracks the commanded leader position using a discrete proportional-derivative controller. Let q_c[k] denote the commanded follower encoder count and let q_f[k] denote the measured follower encoder count. The tracking error is defined as

Follower velocity is estimated numerically from encoder differences,

where Δt is the controller update interval. The follower motor PWM command is computed as

where the implemented gains are K_p=1.05 and K_d=0.06.
The commanded target is rate-limited to 6000 counts/s and then smoothed using exponential smoothing with coefficient α=0.75. When the remaining difference between the filtered target and the commanded target falls below 2 encoder counts, the filtered target is set directly to the commanded value to avoid unnecessary lag near convergence. To suppress chatter near the target, the follower motor is enabled only when |e[k]|≥20 counts and disabled once |e[k]|≤8 counts. PWM output is saturated to the interval 50≤u_f[k]≤210 during active motion, and the follower motor is disabled if no valid leader command is received for more than 250 ms.
Binary Contact Detection
A MD30-60 thin-film force-sensitive resistor (FSR) on the follower side is used as a binary contact detector. Let F_raw[k] denote the raw analog-to-digital converter reading from the force sensor. The instantaneous contact estimate is defined as

The threshold of 920 ADC counts was selected empirically from the follower sensor signal.
To reduce spurious toggling caused by noise and intermittent contact dropout, the binary signal is filtered over a rolling window of length N=4. Let s_c[k] denote the number of positive contact samples in the previous N samples. The filtered contact state is then computed as

This majority filter prevents isolated noisy samples from switching the contact state.
Leader-Side Virtual Wall Rendering
When contact is first confirmed, the current leader encoder count is sampled and stored as the virtual contact boundary. Let q_L[k] denote the measured leader encoder count and let v_L[k] denote the estimated leader velocity in counts/s. The wall location is initialized at the contact instant k_c as
where 𝜏_d=35 ms is the latency-compensation constant. This sample-and-hold operation defines a fixed contact boundary that is retained until the wall is cleared.
Subsequent motion beyond this fixed boundary produces a penetration depth

Leader velocity is estimated numerically as

and then smoothed using exponential smoothing with coefficient α=0.6:

The leader-side haptic resistance is rendered using a virtual spring-damper model,

with implemented gains K_v=4.0 and B_v=0.55. The PWM output is saturated as

and values below 120 are raised to a minimum active output of 120 so that the wall remains perceptible once activated.
The wall state is governed by asymmetric activation and release criteria. Contact has to persist for three consecutive positive contact packets before the wall becomes active, while wall release requires either twenty consecutive no-contact packets or a leader-side retraction of 25 encoder counts relative to the stored boundary. This temporal hysteresis prevents the virtual wall from dropping out during brief sensor dropouts, which is more disruptive than a slightly delayed release.
Leader-Follower Communication
The leader and follower communicate through a software-implemented serial link over GPIO pins. The leader transmits normalized position commands, while the follower transmits raw sensor measurements together with the filtered binary contact state. Leader position commands are transmitted at approximately 100 Hz, and follower contact packets are transmitted at approximately 200 Hz. The faster contact channel reduces perceptual delay during contact onset, while the lower position-update rate is sufficient for the relatively smooth gripper motion.
The control loop operates asynchronously without a shared clock, introducing moderate timing jitter and communication delay. Command deadbands, temporal filtering, and timeout handling were therefore incorporated to suppress jitter and maintain stable teleoperation behavior. If no valid leader command is received for more than 250 ms, the follower motor output is disabled.
Demonstration
The system was demonstrated during a public haptics open-house event using strawberries as delicate-object grasp targets. Participants completed grasping tasks under both position-only and force-feedback operation and were instructed to hold onto the fruit while minimizing visible deformation or damage.
Following the demonstration, participants compared the two operating modes and provided feedback regarding ease of control, contact awareness, and the usefulness of the haptic feedback for detecting initial contact.

Figure 8: Participant performing a teleoperated strawberry manipulation task during the public demonstration event.
Additional demonstration media are provided in the Files section.
Results
Tracking and Contact Rendering
Figure 9 shows the leader-follower response during contact-free teleoperation. The follower tracked the commanded leader motion throughout the trial, with the largest tracking errors occurring during rapid changes in position. In the absence of contact, the contact-state signal remained inactive and no haptic resistance was rendered at the leader interface.
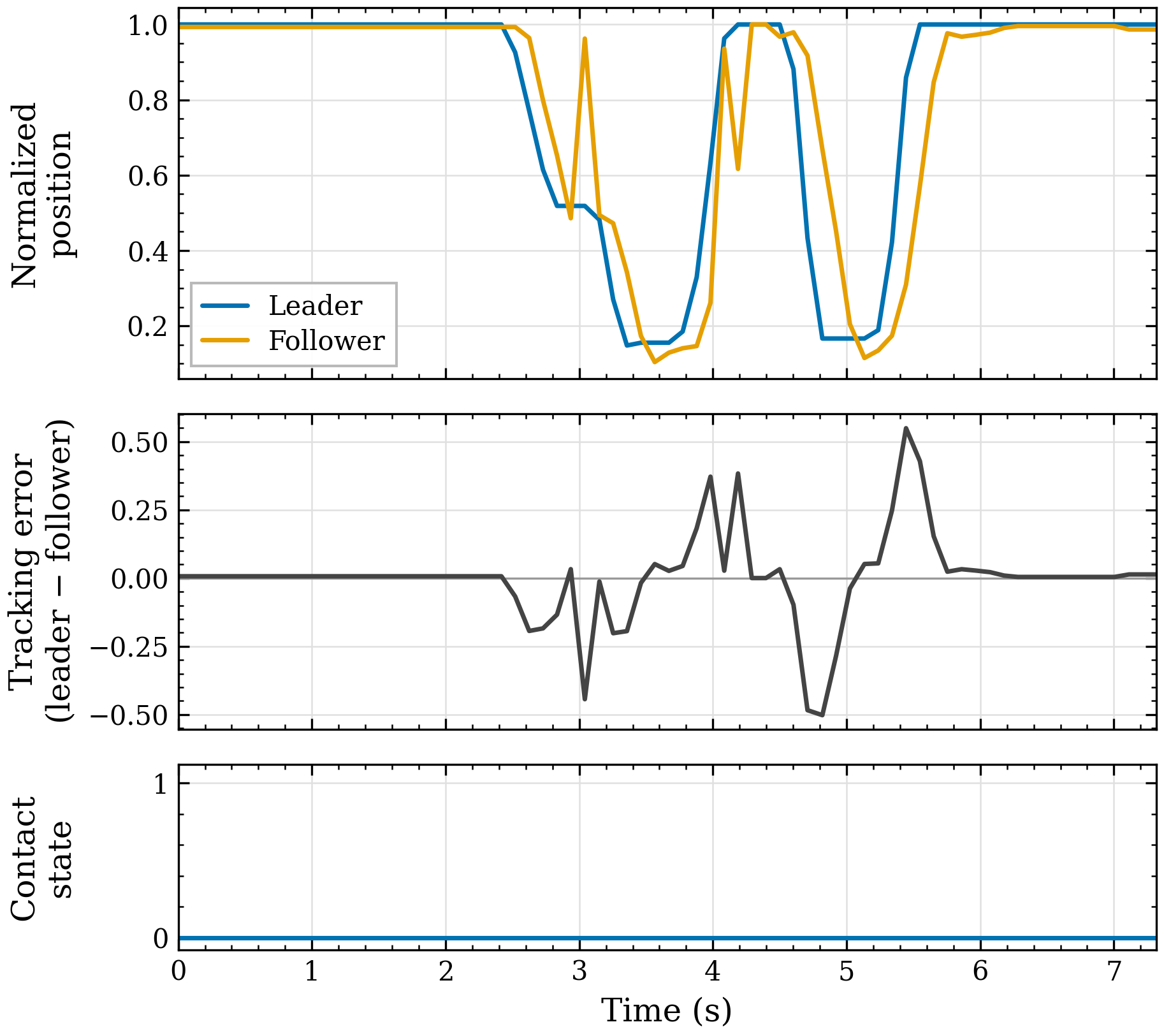
Figure 9: Leader-follower tracking and timing response during contact-free teleoperation. Leader and follower positions are shown in normalized coordinates, where 0 and 1 correspond to the fully open and fully closed positions of each end effector's respective workspace.
Figure 10 shows a representative grasping trial during strawberry manipulation with force feedback enabled. Prior to contact, the follower closely tracked the commanded leader motion. Once contact was detected, follower motion became constrained by interaction with the object while the leader continued to advance, producing a sustained positive tracking error. This behavior is consistent with the intended operation of the virtual-wall controller, which limits further follower motion after contact while rendering a resistive cue to the operator. The contact-state signal remained active for most of the grasp, with only brief intermittent dropouts.
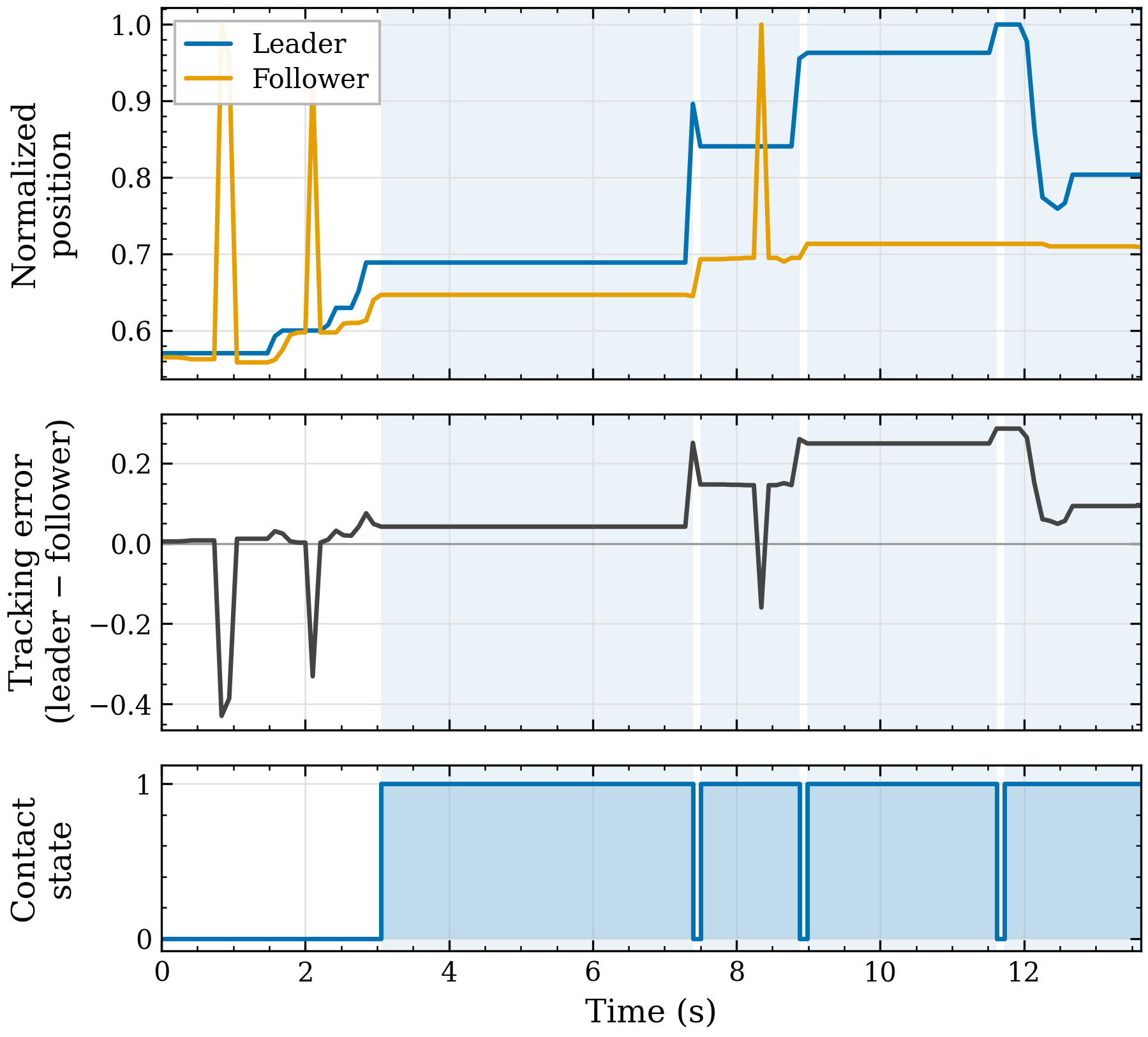
Figure 10: Leader-follower tracking and timing response during strawberry manipulation with force feedback enabled.
Comparison of the two trials demonstrates that the system maintained stable free-space teleoperation while providing a clear haptic response following contact detection. The sustained tracking error observed after contact reflects the intentional separation between leader and follower motion introduced by the contact-rendering strategy rather than a loss of controller stability.
Performance Metrics
Table 1 summarizes several performance metrics measured from logged teleoperation experiments. Contact detection occurred within approximately 0.1 s of follower-side object interaction. The full delay from object contact to perceptible haptic resistance at the leader interface was approximately 0.2 s, including communication, filtering, and virtual-wall activation delays.
Table 1: Performance metrics measured during teleoperation experiments.
| Metric | Measured value |
|---|---|
| Contact-response delay | ≈100 ms |
| Haptic rendering latency | ≈200 ms |
Overall, the experiments demonstrate that the system can provide stable contact-triggered haptic feedback while preserving responsive free-space teleoperation. Although the low-cost force-sensitive resistor was not suitable for continuous force estimation, binary contact detection combined with virtual-wall rendering provided a reliable indication of object interaction during delicate grasping tasks.
User Study
A user study was conducted during the public haptics open-house. Participants completed the strawberry-manipulation task under both position-only and force-feedback operation and were then invited to provide feedback through an anonymous survey on a laptop at the demonstration booth. To encourage unbiased responses, the laptop display was not visible to team members during data collection. A total of 18 survey responses were collected.
Participants compared position-only and force-feedback operation in terms of perceived ease of control, perceived grasp gentleness, and perceived reduction in object damage.
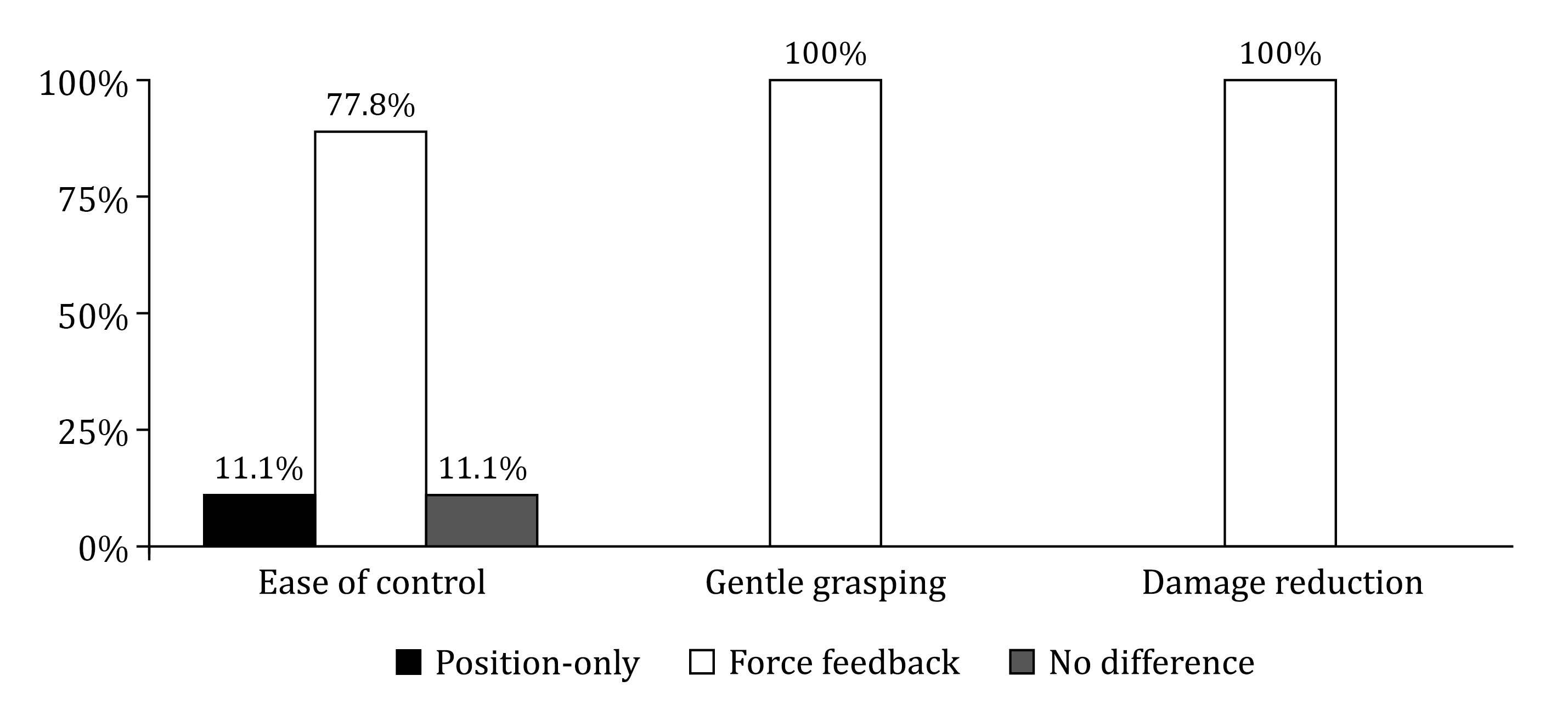
Figure 11: Participant preferences for position-only and force-feedback operation across the three survey categories.
The survey responses showed a strong preference for force-feedback operation across all three comparison categories. Participants also rated the usefulness of the haptic feedback for detecting initial contact on a five-point scale. Sixteen participants (88.9%) assigned the maximum rating of 5/5, while the remaining two participants (11.1%) assigned a rating of 4/5, corresponding to an average score of 4.89/5.
Qualitative observations during the demonstration indicated that participants frequently underestimated the degree of strawberry deformation that occurred during position-only operation, suggesting that visual feedback alone was often insufficient for accurately judging contact onset and grasp force.


Figure 12: Representative examples of strawberry grasp outcomes under force-feedback and position-only teleoperation. Arrows indicate the direction of gripper closure, and overlaid contours highlight differences in object deformation. Left: strawberry grasped with force feedback enabled. Right: Strawberry grasped under position-only control.
These results suggest that the virtual-wall controller provided useful contact cues during delicate-object manipulation.
System Limitations
The primary limitations affecting transparency were drivetrain backlash, transmission friction, and structural deformation under load. Backlash in the follower gearbox, friction in the 3D-printed components, and the relatively low stiffness of PLA reduced the accuracy with which motion and contact cues were transmitted between the leader and follower. These effects were most noticeable during rapid direction changes and when grasping larger objects that generated significant bending moments at the jaw tips.
The force-sensitive resistor exhibited a strong dependence on contact geometry and contact area, producing more consistent readings under localized pinch contact than under broad or flat contact surfaces. This behavior made continuous force estimation unreliable and motivated the use of binary contact detection.
Encoder noise and communication latency reduced system responsiveness. Encoder count noise occasionally introduced small discontinuities in the estimated position and velocity signals, while communication delay introduced a finite lag between follower-side contact events and leader-side force rendering. Despite these effects, temporal filtering, hysteresis, and virtual-wall rendering maintained stability throughout testing.
Future Work
The most immediate improvement would be to replace the force-sensitive resistor with a microswitch. Because the current controller already relies on binary contact detection, a dedicated binary sensor could improve robustness without requiring changes to the control architecture. More advanced implementations could incorporate continuous force sensing using load cells or piezoelectric sensors, enabling proportional force feedback rather than binary contact cues and thereby improving haptic transparency.
Several hardware modifications could further improve transparency, including reduced drivetrain backlash, lower-friction transmission mechanisms such as capstan drives, increased structural stiffness through materials such as polycarbonate, improved fabrication processes such as injection molding or machining for tighter tolerances, and higher-resolution encoders to improve position estimation accuracy.
Future end-effector designs could more closely mimic the kinematics of human pinch grasping, similar to the leader interface of the da Vinci surgical system. A more natural pinch geometry could improve grasp realism by allowing small objects to be manipulated through a true pinching motion rather than large jaw excursions.
Position scaling could further improve manipulation precision by mapping a larger leader motion to a smaller follower motion, enabling finer grasp control and more precise regulation of contact with delicate objects.
A more comprehensive experimental evaluation would include a larger participant pool and a broader range of objects with varying size, shape, and stiffness. Objective metrics such as tracking error, contact-response delay, grasp success rate, and object deformation could then be compared across different hardware and controller configurations.
Files
Code
Control code repository:
https://github.com/ZJU-Walker/ME327project.git
CAD
CAD models and STL files:
https://drive.google.com/drive/folders/1rb1vPmOzoaiP3nOboNCM74tlLB6GWBVy
Demonstration
Videos and photos from the Haptics Open House:
https://drive.google.com/drive/folders/1QJYIIHCfo7sE-Ysv8AyM-vqa5HzyI5Ln
Bill of Materials
https://docs.google.com/spreadsheets/d/1KZdvi0-pHqEnjQZHhabVSUt7N1pD8qMlaLgGXHKPUxU/
References
[1] D. A. Lawrence, “Stability and Transparency in Bilateral Teleoperation,” in Proceedings of the 31st IEEE Conference on Decision and Control, vol. 3, 1992, pp. 2649–2655.
[2] G. Niemeyer and J.-J. E. Slotine, “Telemanipulation with Time Delays,” The International Journal of Robotics Research, vol. 23, no. 9, pp. 873–890, 2004.
[3] J. G. W. Wildenbeest, D. A. Abbink, C. J. M. Heemskerk, F. C. T. van der Helm, and H. Boessenkool, “The Impact of Haptic Feedback Quality on the Performance of Teleoperated Assembly Tasks,” IEEE Transactions on Haptics, vol. 6, no. 2, pp. 242–252, 2013.
[4] R. P. Khurshid, N. T. Fitter, E. A. Fedalei, and K. J. Kuchenbecker, “Effects of Grip-Force, Contact, and Acceleration Feedback on a Teleoperated Pick-and-Place Task,” IEEE Transactions on Haptics, vol. 10, no. 1, pp. 40–53, 2017.
[5] J. M. Romano, K. Hsiao, G. Niemeyer, S. Chitta, and K. J. Kuchenbecker, “Human-Inspired Robotic Grasp Control With Tactile Sensing,” IEEE Transactions on Robotics, vol. 27, no. 6, pp. 1067–1079, 2011.
[6] R. V. Patel, S. F. Atashzar, and M. Tavakoli, “Haptic Feedback and Force-Based Teleoperation in Surgical Robotics,” Proceedings of the IEEE, vol. 110, no. 7, pp. 1012–1027, 2022.
[7] J. Park and O. Khatib, “A Haptic Teleoperation Approach Based on Contact Force Control,” The International Journal of Robotics Research, vol. 25, no. 5–6, pp. 575–591, 2006.
Appendix: Project Checkpoints
Checkpoint 1
At the time of Checkpoint 1, our project underwent a large pivot. Our original proposal combined bilateral teleoperation with a machine-learning comparison, but after discussing scope with the teaching team, we realized that the full plan would be too ambitious for the time available. In particular, the original concept would have required a more complex multi-DOF gripper and a substantial ML effort, which would have split our attention between two large engineering tasks.
We therefore re-scoped the project to focus on the haptics hardware itself: a 1-DOF teleoperated gripper with realistic force feedback. This change is an improvement in scope because it lets us concentrate on the core question of force reflection and device transparency. We decided to prioritize a cleaner mechanical design rather than trying to force a robotics-learning component into the project.
The main checkpoint goal was to agree on a mechanical architecture and define clear work assignments for the team. We accomplished that goal. Based on our design sketches, the follower will use a linear claw motion constrained by rails and bearings, with a motorized transmission and force sensing in the grasp path. We also identified the main build components: claws, base frame, sensor holder, motor shaft, and housing. The design intent is to minimize friction so that the device feels smooth and transmits force cleanly.
We divided the implementation work clearly: Max is handling assembly and force sensors, Quynh is working on housing, Ke is handling coding and electronics, and Loďc is responsible for the claw design. At this stage, we have not completed the final physical build, but the project is now much more concrete and feasible. Our next milestone is to finish the follower hardware until May 19, integrate the sensors and motor, and begin implementing the control loop.
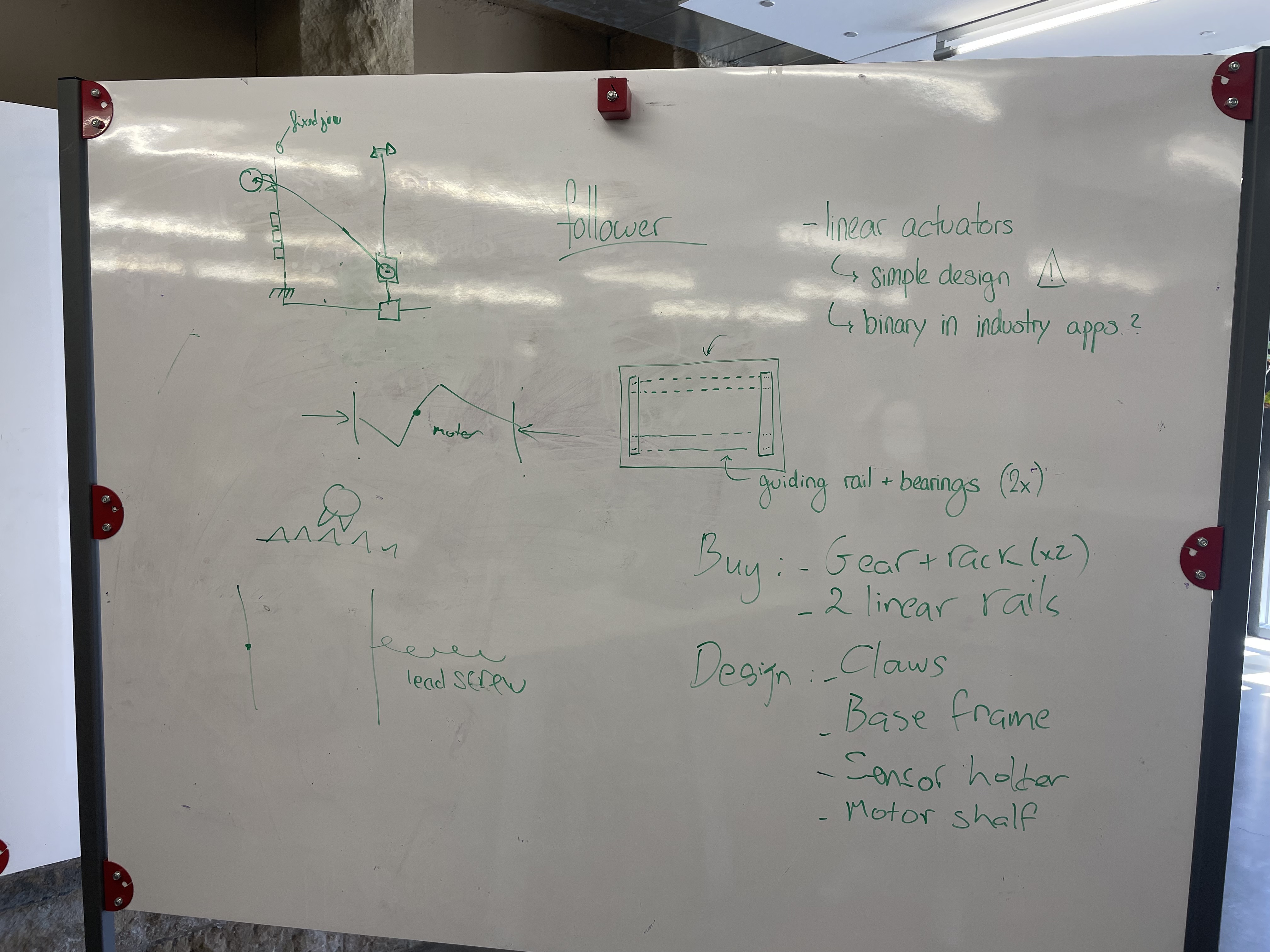
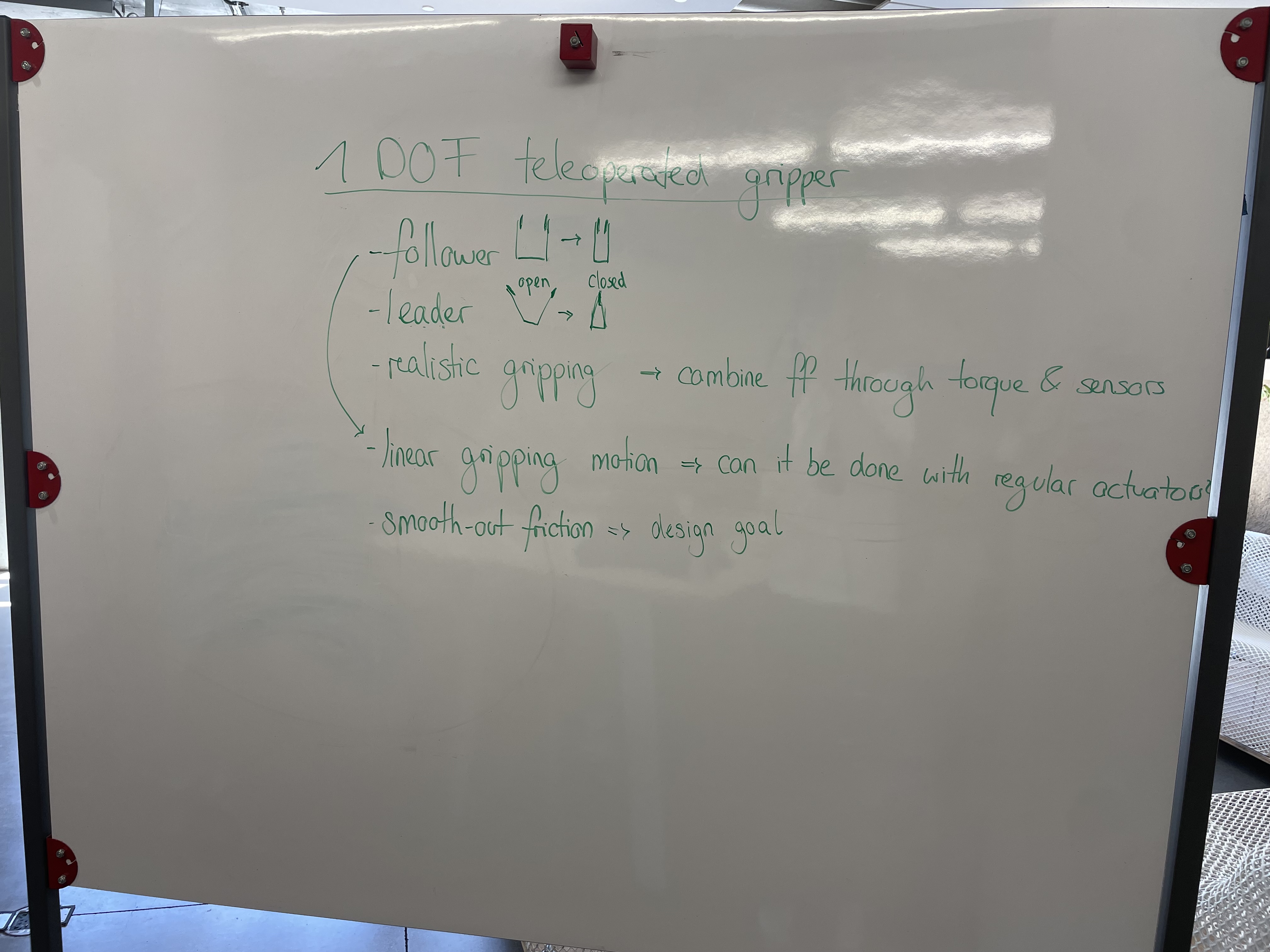
Figure 13: Brainstorming notes from the project's early design phase.
Checkpoint 2
We have completed the main mechanical setup and started building the basic haptic teleoperation pipeline. We designed and 3D printed both the leader and follower grippers, selected suitable motors and force sensors, and began assembling them into the system.
The gripper design was based on the rack and pinion mechanism for linear actuation. Both leader and follower devices are using the same mechanism, however, they both will be controlled by different size motors that is suitable for each their objective. The end effector will be also difference as the follower device will have to incorporate the force sensor and some non-slipping material. The leader device end effector will have features to help human fingers be more comfortable to control (coming soon).
On the control side, we implemented code that adjusts the leader motor torque based on the force measured by the follower-side sensor, so the user can feel resistance when the follower gripper contacts an object. We also started the teleoperation code, where the follower motor replicates the leader motor motion.
The main remaining challenges are tuning the motor response, calibrating the force-to-torque mapping, and making the motion smoother and more stable and do the final assemble.

Figure 14: Early prototype of the shared leader-follower mechanical architecture.