

Ann Majewicz
Contact Information

Ann Majewicz, Ph.D.
Mechanical Engineering
Stanford University
CHARM Laboratory
Stanford, CA 94305
Ann.Majewicz@stanford.edu
Ann is now an assistant professor in Mechanical Engineering at UT Dallas. http://me.utdallas.edu/people/majewicz.html
Research
Robotic Needle Steering: Design and Evaluation for Clinical Application

Robotic needle steering is a minimally invasive surgical technique designed to improve the accuracy and reduce the invasiveness of needle-based surgical procedures such as ablation, biopsy, and brachytherapy. Our needle steering technique consists of using flexible needle with an asymmetric tip which will cause the needle to curve during insertion. By rotating the base of the needle, the direction of curvature can be controlled, allowing the needle to curve around obstacles and acquire 3D targets. https://lcsr.jhu.edu/NeedleSteering
Before clinical needle steering can become a reality, several practical issues must be considered including: 1) understanding the effects of biological tissue on needle steering, 2) developing an appropriate and intuitive interface between the surgeon and the robot, and 3) demonstrating potential clinical applications of robotic needle steering for diagnosis and intervention. My aim for my Ph.D. thesis is to begin exploring these various topics to push needle steering one step closer to clinical use.
Needle Steering in Biological Tissue
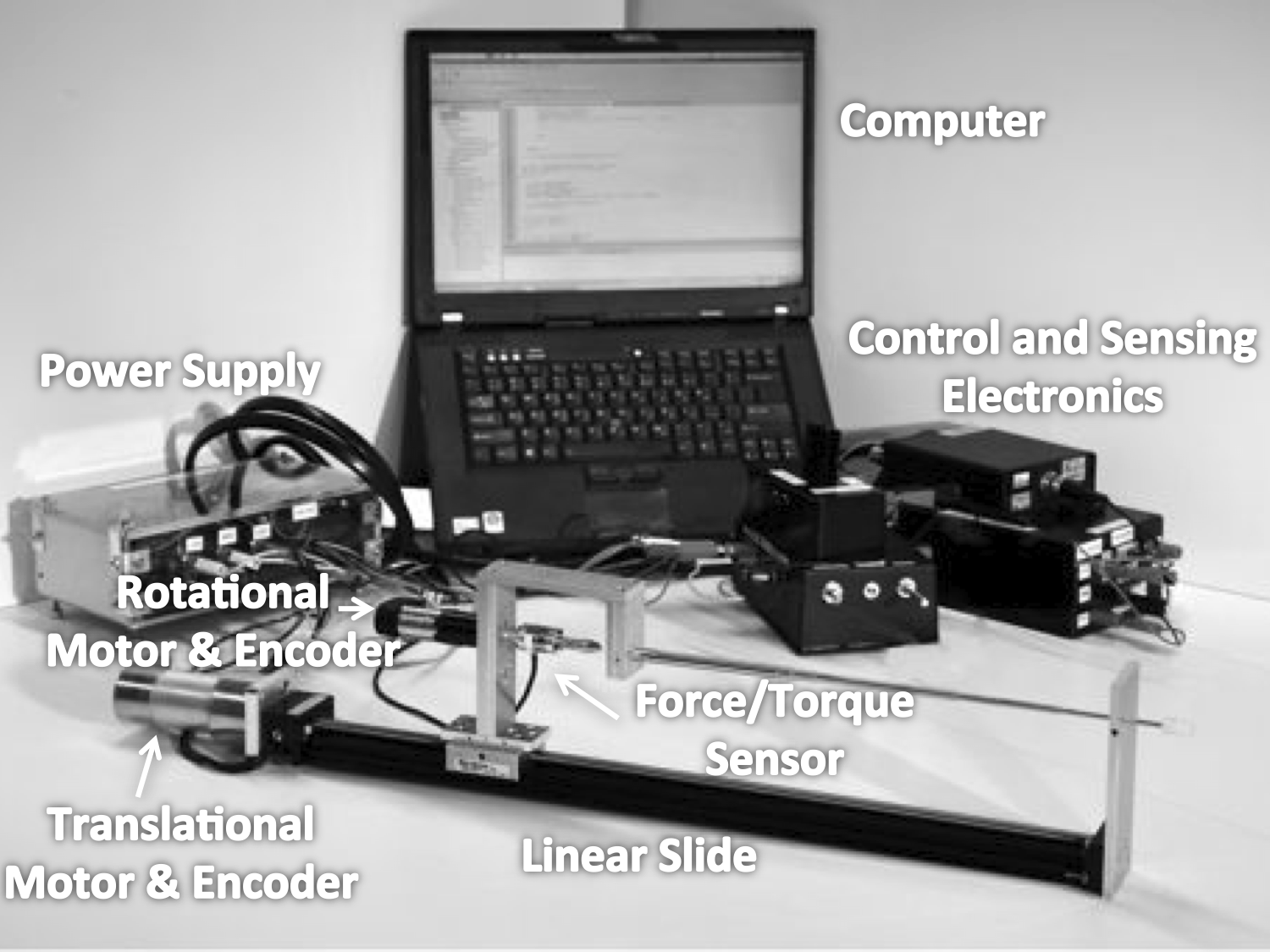
Needle steering in biological tissue presents many challenges for needle steering as needle dexterity is highly dependent on the needle tissue interaction. To begin understanding needle steering in biological tissue we developed a portable version of the Johns Hopkins Needle Steering robot and conducted a series of experiments in ex vivo and in vivo tissue under fluoroscopic and CT imaging.
I have looked how changing needle and environment parameters such as needle tip asymmetry, needle diameter, and insertion velocity affect 2D curvature in ex vivo liver using a goat model. Needle curvature was determined in fluoroscopic images using a technique to intelligently search for the needle using a kinematic model of the steerable needle. This work was conducted at Johns Hopkins University. (Proc. ICRA 2010)
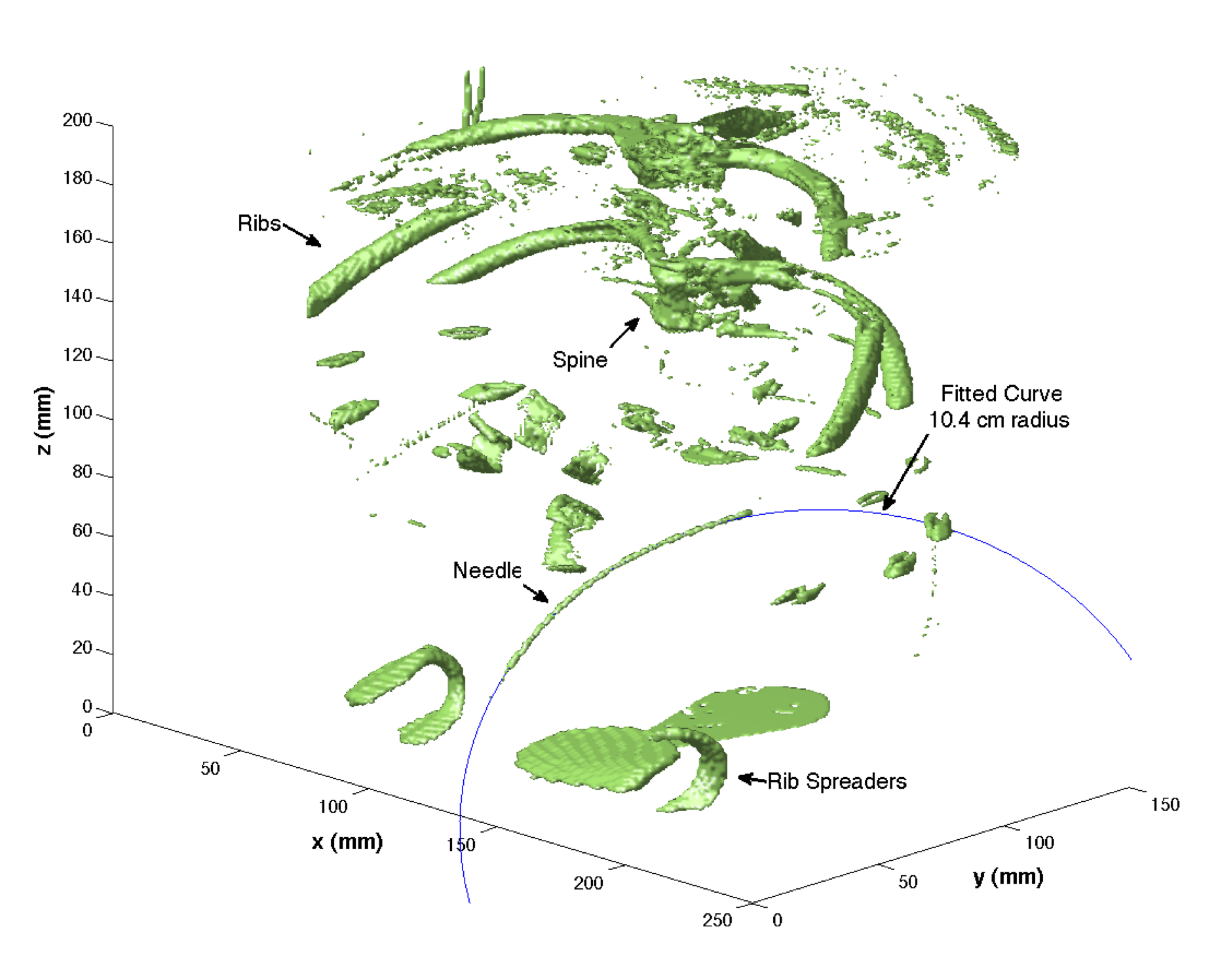
I have also studied 3D needle shape, insertion forces, and tissue damage in ex vivo and in vivo liver, kidney, and prostate in a canine model. I compared conventional straight needles to steerable needles and ex vivo steering to in vivo needle steering. In the in vivo case, 3D needle shape was determined by applying various segmentation techniques to CT images of the needle within the animal. In the ex vivo case, 3D needle shape was determined by obtaining a 3D reconstruction of the needle using stereo fluoroscopic images and the FTRAC tracking fiducial developed at Johns Hopkins University. This work was conducted at Johns Hopkins University and Johns Hopkins Medical Institution. (TBME 2012)
Cartesian and Joint Space Teleoperation for Nonholonomic Steerable Needles

Needles that steer by tip asymmetry are nonholonomic systems, which are difficult to control manually (i.e. in joint space) due to under-actuation and unintuitive kinematic constraints. We propose a new teleoperation approach for nonholonomic systems (steerable needles in particular) that allows a user to command the desired position of a robot in Cartesian space and provides force feedback to represent kinematic constraints and the position error of the robot. We performed a user study with a virtual environment to evaluate the effectiveness of Cartesian space teleoperation in comparison to traditional joint space teleoperation, as well as the role of force feedback in Cartesian space teleoperation. Time- to-target and needle insertion length were significantly smaller for Cartesian space control than for joint space control, and when combined with force feedback, Cartesian space control resulted in significantly less targeting error than joint space control. Force feedback during Cartesian space control also reduced tracking error be- tween the user and needle during insertion. Users rated Cartesian space control as easier overall; however, a few subjects felt they had less direct control of the needle. This results raises an important research question regarding the user's perceived level of control over system behaviors versus objective measures of performance in teleoperation control. (Proc. World Haptics 2013)
Teleoperated Robotic Needle Steering

One of the challenges with teleoperating steerable needles is controlling needle curvature. Duty-cycled spinning methods exist, however, they require continuous rotation of the steerable needle. This a problem because it prevents the use of wired sensors such as force/torque sensors or electromagnetic trackers. For clinical implementation of steerable needles it will be important to incorporate these types of sensors with steerable needles. Thus, we developed two new methods of duty-cycling needles to control needle curvature without the need for continuous rotation - bidirectional duty-cycled spinning and duty-cycled flipping. We conducted evaluation experiments for these two algorithms and will present our findings at ICRA 2014. We are currently optimizing various parameters of our duty-cycling algorithms to determine which method leads to faster, more accurate needle paths, that exert the least amount of force and torque on tissue.
Clinical Applications for Robotic Needle Steering
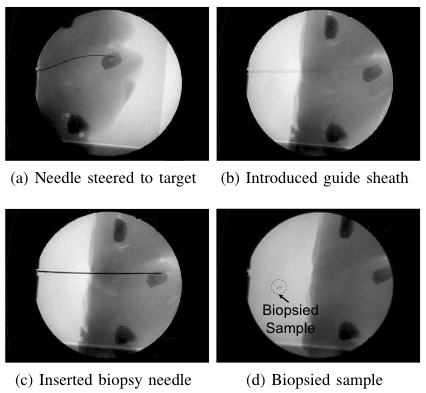
In the current tip-asymmetric needle steering system, solid wires can be steered to targets in 3D space, however, once the needle reaches the intended target, performing a diagnostic or therapeutic maneuver is complicated. Currently, we are using a guidewire-catheter approach in which a flexible plastic sheath is passed over the needle, the needle is removed, and a standard medical device (i.e. biopsy gun, brachytherapy needle, or ablation probe) can be inserted through the plastic sheath to reach the target tissue. I'm interested in exploring additional methods for incorporating diagnostic technology into the steerable needle and to improve the process for delivering therapies to the target tissue.
Haptic Simulator for Osteosynthesis Screw Insertion

Osteosynthesis procedures require the insertion of self-tapping orthopaedic screws through bone plates and into one or two layers of cortical bone, in order stabilize the fractured bones. Applying too much torque can cause the screw to strip and lose purchase, reducing the effective hold of the screw against the plate. Experienced surgeons have developed a "feel" for the torque-rotation relationship that reduces the risk of stripping, however, for residents and novice surgeons, this intuitive "feel" has not been developed. We developed haptic simulator for orthopaedic screw insertion procedures to train surgeons to learn the appropriate torque-rotation relationship in a virtual reality practice scenario. Our simulator is a simple one-degree-of-freedom friction-based haptic device. It presents three bone screw insertion scenarios to the user. We asked several experienced surgeons to evaluate the system for realism and found that realism could be improved with vertical motion and additional screw insertion scenarios.
Education
Ph.D Summer 2014, Mechanical Engineering, Stanford University, Stanford, CA
- Advisor: Dr. Allison Okamura (Mechanical Engineering)
M.S.E. December 2010, Mechanical Engineering, Johns Hopkins University, Baltimore, MD
B.S. May 2008 (with Honors), Mechanical Engineering, University of St. Thomas, St. Paul, MN
B.S. May 2008 (with Honors), Electrical Engineering, University of St. Thomas, St. Paul, MN
Curriculum Vitae
Publications
Journal Papers
- A. Majewicz and A. M. Okamura. Three-Dimensional Cartesian Space Teleoperation of Robotically Driven Steerable Needles. in preparation.
- A. Majewicz, A. A. Stanley, and A. M. Okamura. Design and Analysis of Duty-Cycled Steering Algorithms for Robotically Driven Steerable Needles. Submitted
- A. Majewicz, S. Marra, M. van Vledder, M. Ling, M. A. Choti, D. Y. Song, and A. M. Okamura. Behavior of Tip-Steerable Needles in ex vivo and in vivo Tissue. IEEE Transactions on Biomedical Engineering, 59(10): 2705-2715, 2012. (IEEE Xplore)
- K. B. Reed, A. Majewicz, V. Kallem, R. Alterovitz, K. Goldberg, N. J. Cowan, and A. M. Okamura. "Robot-Assisted Needle Steering," IEEE Robotics & Automation Magazine, Vol. 18, Num. 4, pp. 35-46, Dec. 2011. (IEEE Xplore)
Conference Proceedings
- A. Majewicz, J. Siegel, A. Stanley, A. Okamura. Design and Evaluation of Duty-Cycling Steering Algorithms for Robotically-driven Steerable Needles. IEEE International Conference on Robotics and Automation. To appear.
- A. Majewicz and A. M. Okamura. Cartesian and Joint Space Teleoperation of Nonholonomic Steerable Needles. In IEEE World Haptics Conference (WHC), pp 395-400, 2013. (IEEE Xplore)
- A. Majewicz, T. Wedlick, K. B. Reed, and A. M. Okamura. Evaluation of needle steering in ex vivo tissue. In IEEE International Conference on Robotics and Automation, 2010. pp. 2068-2073 (IEEE Xplore)
- A. Majewicz, J. Glasser, R. Bauer, S. Belkoff, S. Mears, and A. M. Okamura. Design of a haptic simulator for osteosynthesis screw insertion. In Haptics Symposium, pp. 497–500, 2010. (IEEE Xplore)
Abstracts
- M.G. Van Vledder, A. Majewicz, S.P. Marra, D.Y. Song, A.M. Okamura, M.A. Choti. Robot-Assisted Steerable Needles: Prototype Development And Feasibility Studies In An Animal Model. The Journal of Surgical Research. 165.2 (2011): 175
Other technical skills and interests
- Textiles (costume design, garment design, and upholstery for theatrical productions and personal use)
- Linux-based servers (development and management of web servers, file storage systems for multiple users, software licensing, etc.)
- After spending a very formative month in Tanzania working on an unsuccessful solar-powered water pasteurizer project during my senior year of college, I have been passionate about using my talents to develop useful and effective technology to improve quality of life, both here in the US, and the developing world. I'm particularly interested in the intersection between robotic technology, healthcare, and resource poor environments. I have not been able to pursue work in this area during my PhD, but it is something I wish to explore in the future as a faculty member, or through temporary volunteer work. Opportunities for collaboration are greatly welcomed.